Data acquisition for the project is based on the following hardware (unmanned platforms and sensors) that is owned by the Laboratory of Geophysical – Satellite Remote Sensing and Archaeoenvironment, Institute for Mediterranean Studies, Foundation for Researcher and Technology Hellas (FORTH).
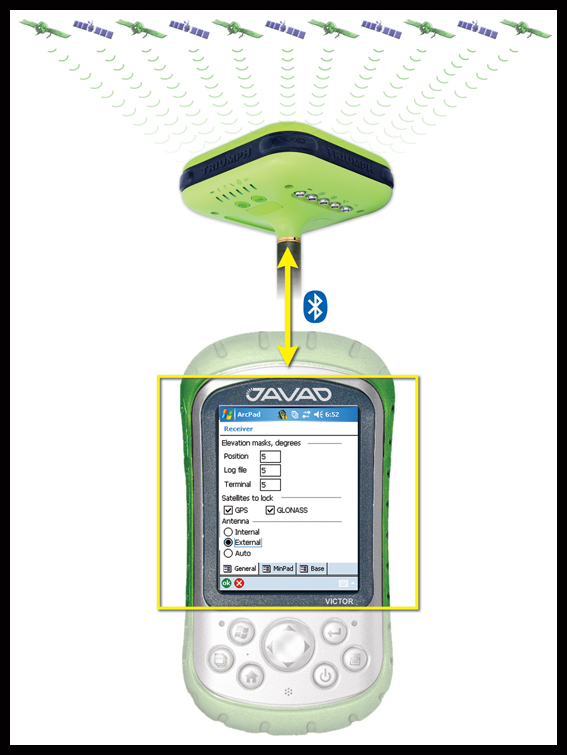
GPS receiver
This GPS antenna is used in Real-Time Kinematics (RTK) mode for collecting ground control points with high accurracy (<20cm). RTK measurements are provided via a HEPOS connection. Accurate ground control points are required for georeferencing centimeter-resolution drone imagery.

Unmanned aerial vehicle (UAV) platform
The DJI Phantom 4 Pro drone is used for collecting aerial imagery. It has a default camera which acquires 16 megapixels RGB imagery in interval mode. In addition, the multispectral camera below is mounted on the drone for acquiring images with calibrated reflectance values.

Multi-spectral sensor
This is a Mica Sense Red-edge model. It is mounted on the UAV and it is connected with its own GPS antenna which is also a down-welling irradiance sensor. This camera collects spectrally-calibrated imagery at four bands in the visible spectrum (red, green, blue, red-edge) and one band at the near infrared spectrum. The near infrared is completely absorbed by the water,thus it is only used for masking the land surface from the sea.

Unmanned surface vehicle (USV) platform
This is an 1-meter long polyester boat for acquiring single-beam sonar bathymetry. It is remotely-controlled and it is mounted with the GPS receiver and the sonar sensor shown below. The USV is ideal for operating in very shallow water depths.

Sonar sensor
This is a single-beam sonar transmitter/receiver. It is battery-powered and it is mounted on the USV side. It is integrated with the GPS via a bluetooth connection and it operates at high frequency (235 kHz) collecting high resolution bathymetric profiles. Sonar measurements are vital for calibrating the drone imagery and producing wide-scale bathymetry.